AR63P

Compensatori assiali
Serie ARP
- Posizione centrale bloccabile
Durante la traslazione del robot potete fissare la compensazione in modo tale che non avvengano movimenti incontrollati del pezzo - Struttura estremamente piatta
Questa struttura riduce al minimo il carico dei momenti per il vostro robot e consente di scegliere dimensioni più piccole e meno costose - Forze e momenti di compensazione variabili
Adattate la compensazione al vostro peso maneggiato, montando il gruppo molle adeguato alla rigidità desiderata
Dati tecnici
| Flangia di collegamento secondo EN ISO 9409-1 | TK 63 |
| Altezza costruttiva | 24 [mm] |
| Deviazione orizzontale +/- | 2 [mm] |
| Deviazione orizzontale +/- | 1 [°] |
| Deviazione verticale +/- | 2 [mm] |
| Deviazione verticale +/- | 1 [°] |
| Forza di centraggio durante il serraggio | 600 [N] |
| Ripetibilità orizzontale +/- | 0.05 [mm/°] |
| Ripetibilità verticale +/- | 0.05 [mm/°] |
| Volume d'aria per ciclo | 3.6 [cm³] |
| Pressione di esercizio | 1 ... 8 [bar] |
| Pressione di esercizio nominale | 6 [bar] |
| Temperatura di esercizio | 5 ... +80 [°C] |
| Momento d'inerzia | 2.8 [kgcm²] |
| Peso | 0.39 [kg] |


Benefici nel dettaglio
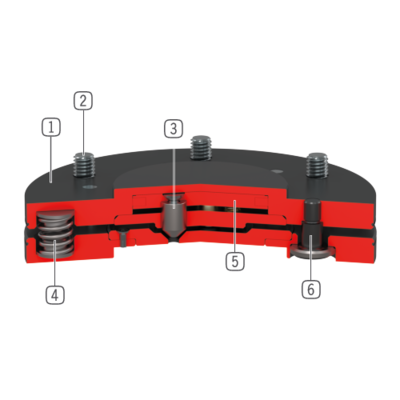
- Carcassa robusta e leggera
Lega di alluminio anodizzata a spessore - Interfaccia per collegamento al robot
disco di centraggio realizzato secondo EN ISO 9409-1 - Serraggio
3 pistoni di serraggio acciaio nitrurato - Gruppo molle
a partire dalla taglia 63, é incluso nella fornitura un secondo kit di molle più forti a partire dalla taglia 100, possono essere rimosse tre molle - Meccanismo di serraggio
cilindro pneumatico a semplice effetto - Perno di guida con calotta sferica