机器人外壳的搬运系统

挑战
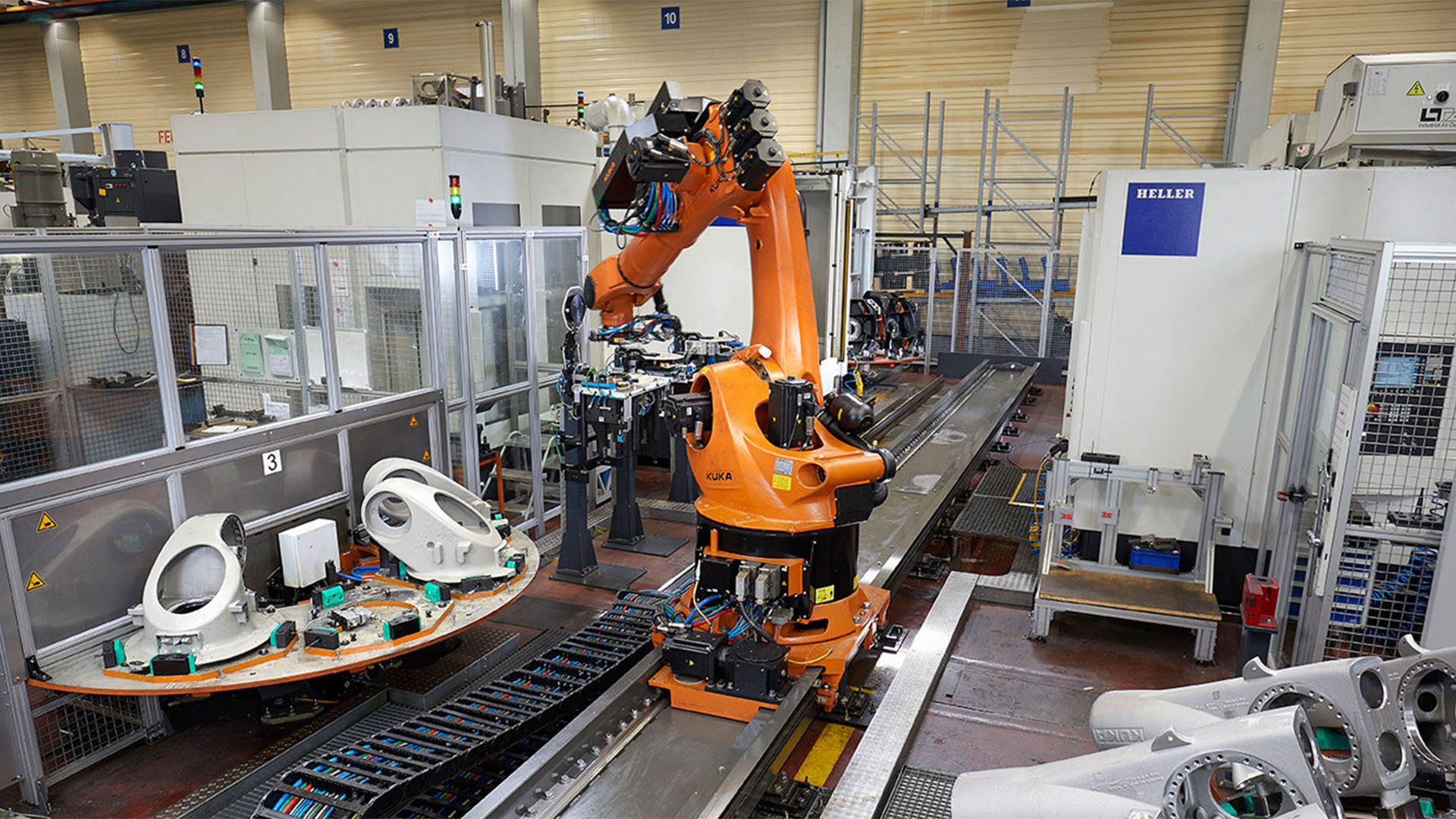
三个加工中心将与一个机器人相互连接。由于自动化是加装的,所以空间要求和机器人的尺寸都受到限制。这些机器还将用于加工非常多的零件。
解决方案
由于零件种类繁多,采用了自动机械手更换。夹具的设计是为了优化重量,以便可以使用一个紧凑的机器人。
三个加工中心将与一个机器人相互连接。由于自动化是加装的,所以空间要求和机器人的尺寸都受到限制。这些机器还将用于加工非常多的零件。
由于零件种类繁多,采用了自动机械手更换。夹具的设计是为了优化重量,以便可以使用一个紧凑的机器人。

