WWR63L-B

Zmieniacz narzędzia
Seria WWR
- Pewny chwyt przy spadku ciśnienia
Połączenie mechanizmu sprężynowego i wysokiego przełożenia gwarantuje bezpieczeństwo maszyny. - Ekstremalnie niska konstrukcja
Konstrukcja ta minimalizuje obciążenie robota momentem i umożliwia stosowanie mniejszych, ekonomiczniejszych elementów. - Nieograniczona różnorodność przenośników mediów
Niezależnie od tego, jakie medium klient zamierza transportować, mamy w tym zakresie bogate doświadczenie i na pewno znajdziemy rozwiązanie do każdego zastosowania!
Dane techniczne
| Kołnierz montażowy wg EN ISO 9409-1 | TK 63 |
| Przeniesienie energii pneumatyczne | 6 [Liczba] |
| Przepływ na element przenoszący | 170 [l/min] |
| Przeniesienie energii elektryczne | opcjonalnie |
| Hamowanie samoistne przy ryglowaniu | mechaniczny |
| Dokładność powtarzania w Z | 0.01 [mm] |
| Dokładność powtarzania w X, Y | 0,02 [mm] |
| Przenoszenie osi przy łączeniu maks. w X, Y | 1.65 [mm] |
| Ciśnienie robocze | 4 ... 10 [bar] |
| Nominalne ciśnienie robocze | 6 [bar] |
| Temperatura robocza | 5 ... +80 [°C] |
| Moment bezwładności masy | 2.2 [kgcm²] |
| Masa | 0.3 [kg] |





Konstrukcja w przekroju
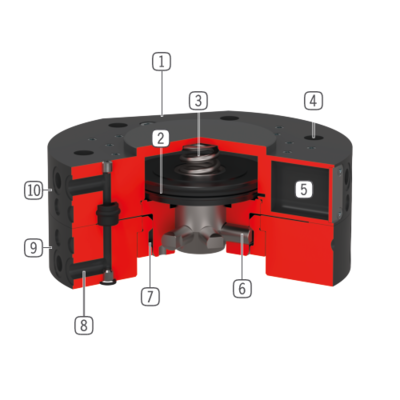
- Mocowanie elementu zasilającego
- Napęd
Siłownik pneumatyczny o podwójnym działaniu - Zintegrowana sprężyna
Pochłaniacz energii przy spadku ciśnienia - Kołnierz robota
Grupa części wg EN ISO 9409-1 - Kontrola pozycji tłoka
Za pomocą czujników pola magnetycznego - Trzpień ryglujący
Dopasowany do tulei ryglującej - Tuleja blokująca
Duże pochłanianie momentu - Zintegrowany przepust powietrza
Przepust powietrza i próżni możliwe wysterowanie bezprzewodowe - Element luźny
Do montażu od strony narzędzia - Część stała
Do montażu po stronie robota