Ekosystem End-of-Arm MATCH
Odkryj MATCH! Znormalizowany interfejs łączy w sobie dwie główne technologie manipulacji: systemy chwytakowe i podciśnieniowe. Innowacyjny ekosystem – składający się z modułu robota, chwytaka, stacji odkładania i odpowiedniego oprogramowania – można szybko i łatwo zintegrować, umożliwiając rentowną produkcję w krótkim czasie, nawet w przypadku małych ilości produkcyjnych. Zapewnia to maksymalną elastyczność – zarówno pod względem wyboru efektora końcowego, jak i wyboru robota. MATCH jest kompatybilny ze wszystkimi popularnymi robotami dostępnymi na rynku. Znormalizowany interfejs i możliwość wymiany ręcznej lub automatycznej gwarantuje przygotowanie na stale zmieniające się wymagania i wyzwania na rynku.




Wyjątkowa technologia











FAQ – Pytania i odpowiedzi na temat MATCH
MATCH to znormalizowany interfejs, który łączy główne technologie manipulacji – systemy chwytakowe i podciśnieniowe. Krótki czas dostosowywania oznacza, że jesteś idealnie przygotowany na rosnące wymagania rynku. Nieskomplikowana integracja umożliwia szybką i rentowną produkcję, nawet w przypadku małych serii produkcyjnych. Możesz cieszyć się maksymalną elastycznością przy wyborze zarówno efektora końcowego, jak i robota. MATCH jest kompatybilny ze wszystkimi popularnymi robotami. Znormalizowany interfejs i możliwość wymiany ręcznej lub automatycznej zapewnia doskonałe przygotowanie na dynamiczne wymagania automatyzacji.
Nawet bez opcji wymiany MATCH oferuje liczne korzyści i przygotowuje na przyszłe wyzwania. MATCH jest gotowy do natychmiastowego użycia i podłączenia. Intuicyjne oprogramowanie wspiera użytkownika podczas uruchamiania i sterowania – bez konieczności posiadania wiedzy programistycznej. Znormalizowany interfejs zapewnia również szeroki wybór efektorów końcowych. Prosta obsługa techniczna i serwis ułatwiają pierwsze kroki w automatyzacji i prowadzą szybko do rentownej produkcji, nawet w przypadku niewielkich serii produkcyjnych.
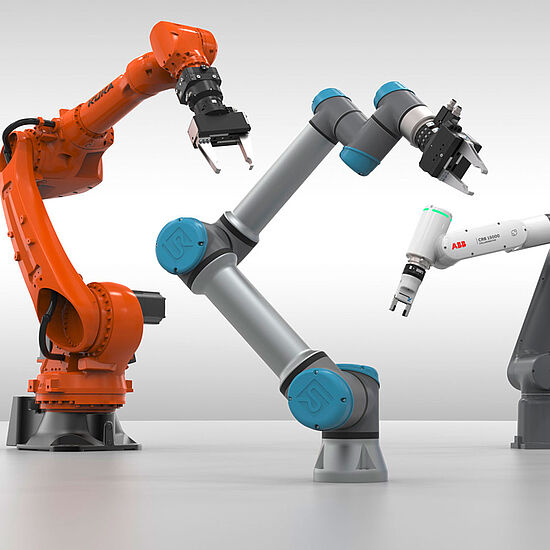
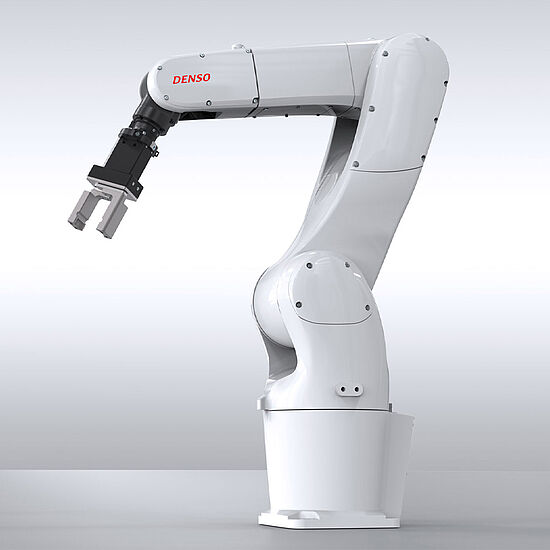
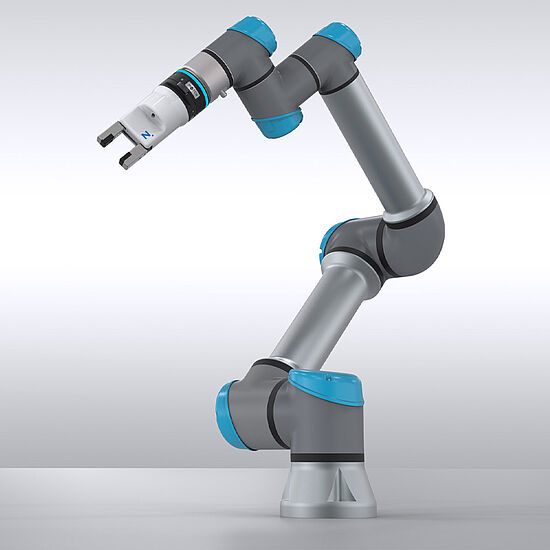
Ekosystem End-of-Arm MATCH jest kompatybilny z wiodącymi markami robotów, takimi jak ABB, Denso, Doosan, KUKA, Universal Robots, Fanuc, Yaskawa, Stäubli i Mitsubishi. Jeśli nie masz pewności, czy Twój robot jest kompatybilny, skontaktuj się z nami.
Oferujemy rozwiązania dla niemal każdego użytkownika i typu robota. Jeśli Twój model robota nie znajduje się na liście, skontaktuj się z nami.
Chwytak i robot komunikują się za pośrednictwem Smart Communication Modul (SCM). Moduł ten służy jako interfejs dla efektora końcowego i tłumaczy system komunikacji IO-Link na cyfrowe wejścia/wyjścia i odwrotnie. Komunikuje się bezpośrednio ze sterownikiem robota i umożliwia szybkie i łatwe sterowanie efektorem końcowym.
Tak, moduł SCM jest dostępny zarówno bez oprogramowania do samodzielnego okablowania, jak i jako kompletny pakiet z kablem i oprogramowaniem dostosowanym do producenta robota. Pakiet ten zapewnia natychmiastową gotowość do użycia, bez konieczności dodatkowego okablowania i oprzewodowania.
Zawarta w pakiecie aplikacja ComfortApp, która jest dostosowana do producenta robota, umożliwia wygodne i bezpośrednie sterowanie efektorem końcowym za pośrednictwem jednostki sterującej robota. Są w niej zawarte wszystkie polecenia niezbędne do płynnej automatycznej pracy.
Podstawowym wyposażeniem do prostych zastosowań, takich jak otwieranie i zamykanie chwytaka, jest opcja cyfrowych I/O. Inteligentna wersja IO-Link jest zalecana do bardziej złożonych aplikacji, które wymagają dodatkowych ustawień siły lub skoku, a także monitorowania stanu. RS485 jest specyficznym dla producenta odpowiednikiem IO-Link.
Dzięki znormalizowanemu interfejsowi modułu robota można stosować różne efektory końcowe. W zależności od zastosowania dostępne są chwytaki IO-Link z modułem IO-Link lub chwytaki cyfrowe z cyfrowym modułem I/O.
W zależności od zastosowania można wybrać komponenty podciśnieniowe J. Schmalz lub chwytaki Zimmer Group. Dzięki opcjom ręcznej lub automatycznej wymiany dostępne są obie technologie manipulacji.
Jeśli nie masz pewności, który komponent manipulacyjny jest odpowiedni do Twojej aplikacji, skontaktuj się z nami.
Ekosystem End-of-Arm MATCH jest kompatybilny z wiodącymi markami robotów, takimi jak ABB, Denso, Doosan, KUKA, Universal Robots, Fanuc, Yaskawa, Stäubli i Mitsubishi. Jeśli nie masz pewności, czy Twój robot jest kompatybilny, skontaktuj się z nami.
Efektor końcowy może być wymieniany ręcznie lub automatycznie za pomocą stacji odkładania i ruchu sterowanego przez robota.
Dzięki znormalizowanemu interfejsowi moduł robota MATCH jest kompatybilny z większością popularnych modeli robotów. W razie wątpliwości prosimy o kontakt.