Systemreferenz
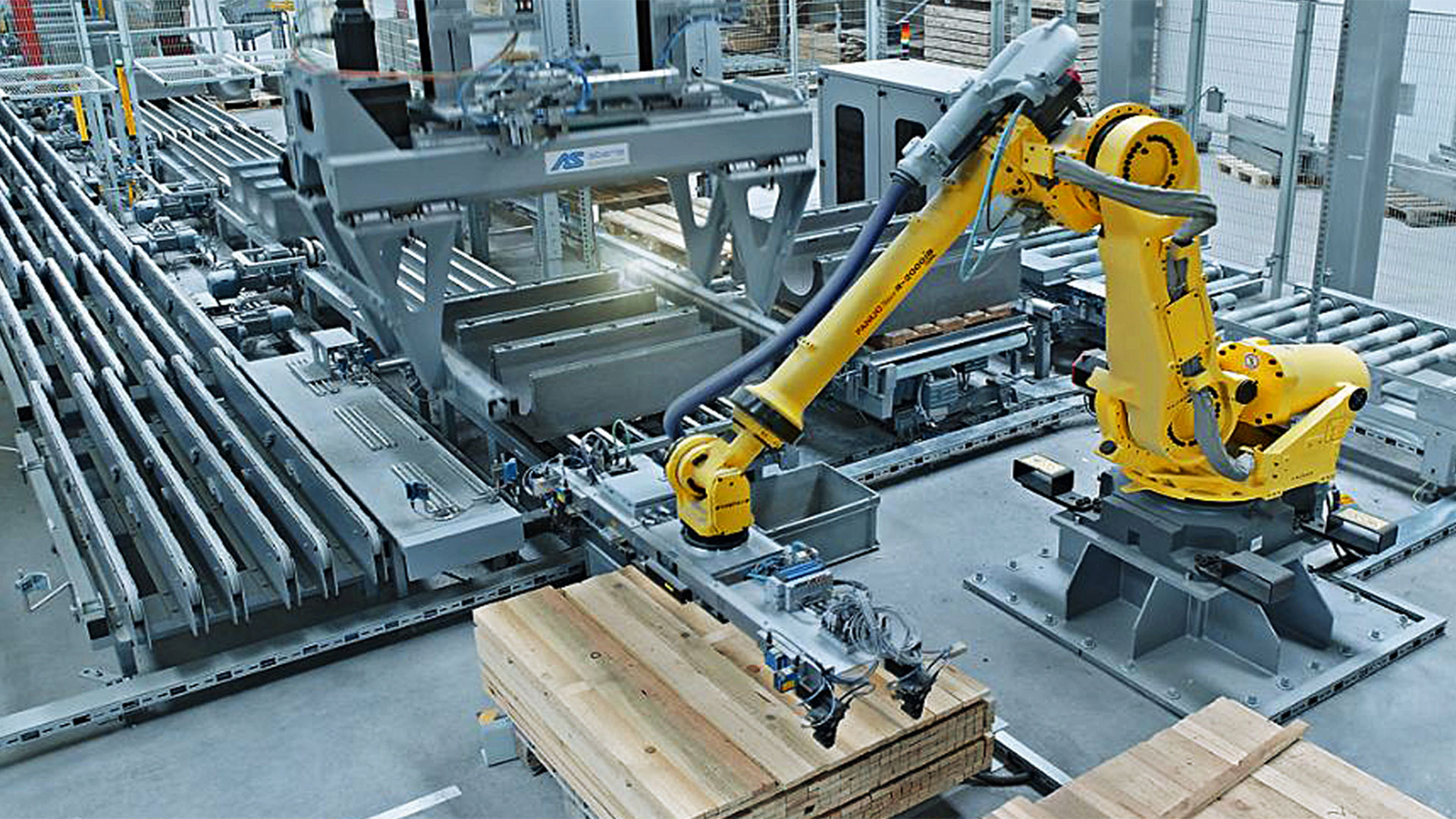
Greifer für Holzlatten
Schwenk- und Drehmodule | Systemlösungen | Logistik
Schwenkbacken
Serie SBZ

- Einstellbare Endlagendämpfung durch integrierte Stoßdämpfer
- Mehrfach kugelgelagert für hohe Momentenaufnahme
2-Backen-Parallelgreifer mit großem Hub
Serie GH6000

- Über Zahnrad synchronisierter Direktantrieb
- T-Nutenführung für maximale Kräfte und Momentenaufnahme
1. Schwenk- und Drehmodule

- Einstellbare Endlagendämpfung durch integrierte Stoßdämpfer
- Mehrfach kugelgelagert für hohe Momentenaufnahme
2. 2-Backen-Parallelgreifer

- Über Zahnrad synchronisierter Direktantrieb
- T-Nutenführung für maximale Kräfte und Momentenaufnahme
Herausforderung
Bei der Intralogistik in einem Betonwerk mussten Holzlatten als Zwischenlage für Betonrinnen gehandhabt werden. Die Herausforderung lag in der ungenauen Bereitstellung und ungleichmäßigen Geometrie (Verzug) der Holzlatten.
Lösung
Als Lösung diente ein speziell entwickelter Greifer mit integrierter Kamera. Die Kamera erfasste die Lage und Geometrieabweichung und gab diese als Korrekturfaktor an den Roboter weiter. Die Latten wurden stirnseitig aufgenommen und konnten im gegriffenen Zustand geschwenkt werden.
Highlights und Technische Daten
 IP40
IP40 Pneumatisch
Pneumatisch Außengreifen
Außengreifen Greifkraftsicherung bei Druckerhaltung
Greifkraftsicherung bei Druckerhaltung
Technische Daten
| Antriebsart | pneumatisch |
| Greifkraft max. | 530 [N] |
| Greifkonzept | Formschluss |
| Greifsicherung | Drucksicherung |
| Hub max. | 160 [mm] |
| IP Klasse | IP40 |
| Systemgewicht | 35 [kg] |
| Werkstückgewicht max. | 1.5 [kg] |
| Werkstücktemperatur max. | 80 [°C] |
Verbaute Standardkomponenten