Compensatori assiali
Serie ARP
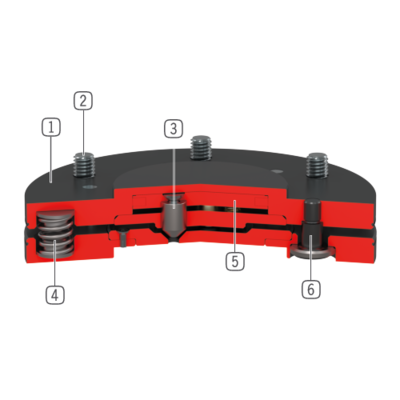
- Posizione centrale bloccabile
Durante la traslazione del robot potete fissare la compensazione in modo tale che non avvengano movimenti incontrollati del pezzo
- Struttura estremamente piatta
Questa struttura riduce al minimo il carico dei momenti per il vostro robot e consente di scegliere dimensioni più piccole e meno costose
- Forze e momenti di compensazione variabili
Adattate la compensazione al vostro peso maneggiato, montando il gruppo molle adeguato alla rigidità desiderata