HRC-03-116787
- Nach BG / DGUV - Empfehlungen konstruiert
- BG / DGUV zertifiziert
- Flexibilität durch integrierte Werkstückerkennung über den gesamten Hub
- Bürstenlose Antriebstechnik
- Mechanische Selbsthemmung für sicheres Handling auch im Not-Aus-Betrieb
Technische Daten
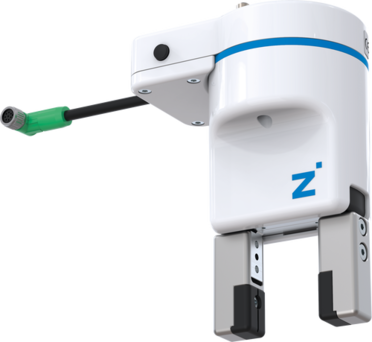
| Passend für Robotertyp | FANUC CRX |
| Ansteuerung | I/O |
| Kabelführung | intern |
| Multifunktionstaster | frei programmierbar / Freedrive |
| MRK-Design nach ISO/TS 15066 | Ja |
| MRK-Form | kollaborativ |
| Antriebsart | elektrisch |
| Positionsabfrage | integriert |
| Positionsabfrage analog 0 ... 10 V | Ja |
| Schaltausgang | PNP |
| Hub pro Backe | 10 [mm] |
| Selbsthemmung | mechanisch |
| Greifkraft beim Schließen (einstellbar) max. | 190 [N] |
| Greifkraft beim Öffnen (einstellbar) max. | 190 [N] |
| Nenngreifkraft | 190 [N] |
| Greifkraft nach ISO/TS 15066 | <140 [N] |
| Schließzeit | 0.19 [s] |
| Öffnungszeit | 0.19 [s] |
| Steuerzeit | 0,03 [s] |
| Eigengewicht montierte Greifbacke max. | 0.1 [kg] |
| Länge Greifbacken max. | 80 [mm] |
| Wiederholgenauigkeit +/- | 0.05 [mm] |
| Betriebstemperatur | 5 ... +50 [°C] |
| Spannung | 24 [V] |
| Stromaufnahme max. | 1 [A] |
| Mindestanfahrweg pro Backe | 0.5 [mm] |
| Schutzart nach IEC 60529 | IP40 |
| Gewicht | 0.68 [kg] |