HRC-01-102975
- Nach BG / DGUV - Empfehlungen konstruiert
- BG / DGUV zertifiziert
- Flexible Positionierung der Greiferbacken durch Servotechnik
- Bürstenlose Antriebstechnik
- Mechanische Selbsthemmung für sicheres Handling auch im Not-Aus-Betrieb
- Verschiedene Antriebsmodi wie Kraftmodus, Positionsmodus, vorpositionierter Kraftmodus usw.
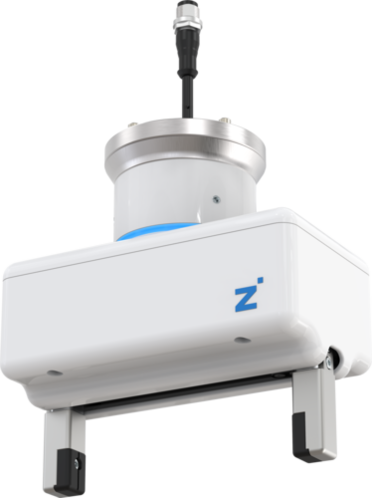
- 360° Statusanzeige durch integriertes LED-Band
- Bidirektionale Kommunikation für Prozess- und Servicedaten (Feldbus offen)