AR50P

Achsausgleiche
Serie ARP
- Zentrumsstellung verriegelbar
Beim Verfahren Ihres Roboters können Sie den Ausgleich fixieren, so dass keine unkontrollierten Bewegungen des Werkstückes stattfinden - Extrem flach bauend
Diese Bauweise reduziert die Momentenbelastung für Ihren Roboter auf ein Minimum und ermöglicht den Einsatz kleinerer, kostengünstigerer Baugrößen - Variable Ausgleichskräfte und Momente
Passen Sie den Ausgleich an Ihr Handlingsgewicht an, indem Sie je nach gewünschter Steifigkeit das passende Federpaket montieren
Technische Daten
| Anschlussflansch nach EN ISO 9409-1 | TK 50 |
| Bauhöhe | 21.5 [mm] |
| Auslenkung horizontal +/- | 2 [mm] |
| Auslenkung horizontal +/- | 1 [°] |
| Auslenkung vertikal +/- | 2 [mm] |
| Auslenkung vertikal +/- | 1 [°] |
| Zentrierkraft beim Verriegeln | 170 [N] |
| Wiederholgenauigkeit horizontal +/- | 0.05 [mm/°] |
| Wiederholgenauigkeit vertikal +/- | 0.05 [mm/°] |
| Luftvolumen pro Zyklus | 2 [cm³] |
| Betriebsdruck | 1 ... 8 [bar] |
| Nennbetriebsdruck | 6 [bar] |
| Betriebstemperatur | 5 ... +80 [°C] |
| Massenträgheitsmoment | 1.1 [kgcm²] |
| Gewicht | 0.2 [kg] |


Aufbau im Schnitt
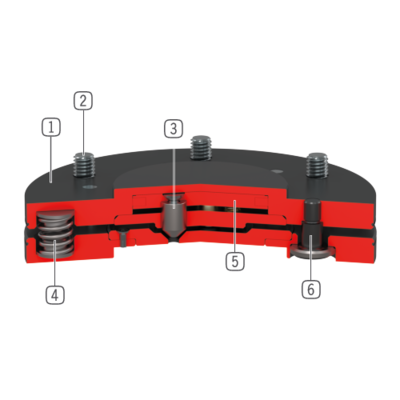
- Robustes, leichtes Gehäuse
hartbeschichtete Aluminiumlegierung - Roboterflansch
Teilkreis nach EN ISO 9409-1 - Verriegelung
3 Verriegelungskolben nitrierter Stahl - Federpaket
ab Baugröße 63, liegt ein zweites, stärkeres bei ab Baugröße 100, können 3 Federn entfernt werden - Verriegelungsantrieb
einfachwirkender Pneumatikzylinder - Führungsbolzen mit Kugelpfanne