Compensadores de ejes
Serie ARP

- Posición centrada bloqueable
Al mover el robot, puede fijar la compensación de modo que la pieza no se mueva de forma incontrolada - De construcción extremadamente plana
Este tipo de construcción reduce al mínimo la carga de momentos para los robots y permite emplear tamaños menores y más económicos - Momentos y fuerzas de compensación variables
Adapte la compensación al peso de manipulación mediante el montaje del conjunto de muelles adecuado según la rigidez deseada
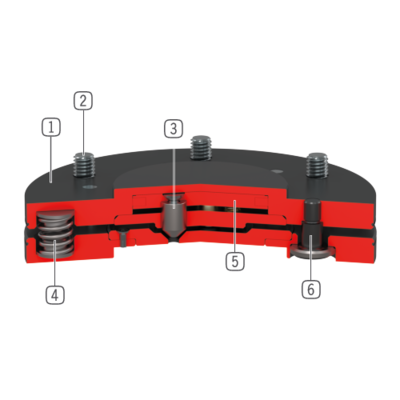
- Carcasa robusta y ligera
Aleación de aluminio anodizado duro - Brida de sujeción a robot
circulo primitivo según EN ISO 9409-1 - Enclavamiento
3 Émbolos de enclavamiento acero nitrurado - Conjunto de muelles
a partir del tamaño 63, se suministra un segundo juego de muelles más fuertes a partir del tamaño 100, se pueden retirar 3 muelles - Accionamiento de enclavamiento
cilindro neumático de simple efecto - Leva de guía con alojamiento de bola