GEP2006IO-00-B

2-Backen-Parallelgreifer
Serie GEP2000
"Der elektrisch Kompakte"
- Größter Hub bei kleinem Bauraum
Benötigen Sie einen großen Hub, weil Sie formschlüssig Greifen oder ein großes Teilespektrum fahren, aber der Bauraum und die Traglast in Ihrer Applikation ist beschränkt? Dann ist dieser Greifer Ihre erste Wahl! - Einfachste Ansteuerung
Ob Sie den Greifer wie ein Ventil über I/O Ports ansteuern oder die Version mit IO-Link bevorzugen ist Ihre Wahl. Eins vereint sie, beide Versionen sind einfach in Ihre Steuerung zu integrieren. - Positionierbarkeit über IO-Link
Erlaubt es Ihnen die Greiferbacken der Variante IL-03 und IL-43 zu positionieren. So lässt sich der Hub ganz flexibel an das Werkstück anpassen, was im Prozess zu einer Zeitersparnis und einer Vermeidung von Störkonturen führt.
Ausstattung/Optionen
 10 Mio. wartungsfreie Zyklen (max.)
10 Mio. wartungsfreie Zyklen (max.) IP40
IP40 Mechanische Selbsthemmung
Mechanische Selbsthemmung Greifkraft einstellbar
Greifkraft einstellbar Digital I/O
Digital I/O Reinraumzertifiziert
Reinraumzertifiziert
Technische Daten
| Ansteuerung | I/O |
| Integrierte Positionsabfrage | nein |
| Hub pro Backe | 6 [mm] |
| Positionsabfrage | Magnetfeld |
| Positionsabfrage Magnetfeld | Ja |
| Selbsthemmung | mechanisch |
| Greifkraft max. | 145 [N] |
| Greifkraftsicherung | mechanisch |
| Steuerzeit | 0,03 [s] |
| Eigengewicht montierte Greifbacke max. | 0,05 [kg] |
| Länge Greifbacken max. | 60 [mm] |
| Wiederholgenauigkeit +/- | 0.02 [mm] |
| Betriebstemperatur | 5 ... +60 [°C] |
| Spannung | 24 [V] |
| Stromaufnahme max. | 1 [A] |
| Mindestanfahrweg pro Backe | 0.5 [mm] |
| Reinraumklasse nach DIN EN ISO 14644-1 | 2 |
| Schutzart nach IEC 60529 | IP40 |
| Gewicht | 0.18 [kg] |
| Greifkraft Stufe 1 | 40 [N] |
| Schließzeit / Öffnungszeit Stufe 1 | 0.21 / 0.21 [s] |
| Greifkraft Stufe 2 | 75 [N] |
| Schließzeit / Öffnungszeit Stufe 2 | 0.15 / 0.15 [s] |
| Greifkraft Stufe 3 | 110 [N] |
| Schließzeit / Öffnungszeit Stufe 3 | 0.12 / 0.12 [s] |
| Greifkraft Stufe 4 | 145 [N] |
| Schließzeit / Öffnungszeit Stufe 4 | 0.1 / 0.1 [s] |
Zubehör



Aufbau im Schnitt
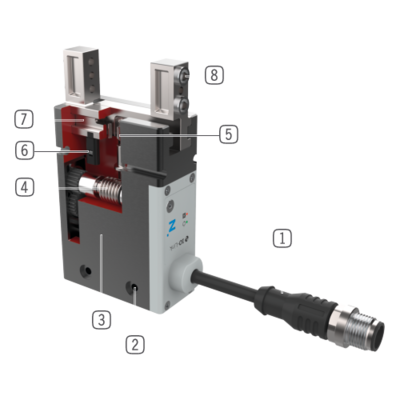
- Ansteuerung
über I/O Ports (IO) oder über IO-Link (IL) - Befestigung und Positionierung
alternativ an mehreren Seiten für eine individuelle Montage - BLDC Motor
verschleißarmer bürstenloser Gleichstrommotor - Schrägzahnrad-Schneckengetriebe
Selbsthemmung bei Stromabfall - Synchronisation
über Ritzel und Zahnstange - Positionsabfrage
Permanentmagnet zur direkten Abfrage der Backenbewegung über Magnetfeldsensoren - Greiferbacke
Aufnahme der individuellen Greifbacke - Abnehmbare Zentrierhülse
schnelle und kostengünstige Positionierung der Greifbacken
