SCM-C-02-11-A

- Konwersja sygnałów IO-Link na cyfrowe sygnały wejścia/wyjścia (Digital I/O) i na odwrót
- Najprostsze sterowanie inteligentnymi chwytakami IO-Link poprzez cyfrowe I/O 24 V
- Konfiguracja i programowanie przy użyciu dostarczanego w zestawie intuicyjnego oprogramowania guideZ
- Gotowy do podłączenia zestaw kabli dla odpowiedniego typu kontrolera
- Zależnie od potrzeb można używać do sterowania jednym lub dwoma chwytakami
- W zależności od wymaganej elastyczności, jeden chwytak może obsługiwać do 15 różnych elementów. Alternatywnie można użyć dwóch chwytaków.
Dane techniczne
| Pasuje do typ robota | Yaskawa GP / HC-Series |
| Pasuje do typu kontrolera | Yaskawa - YRC 1000-micro |
| Logika IO | PNP |
| Sterowanie | Wersją I/O |
| Liczba chwytaków maks. | 2 |
| Liczba styków (wejście sterowania) | 12 |
| Liczba styków (wyjście sterowania) | 12 |
| Konfiguracja interfejsu | Ethernet RJ45 |
| Napięcie | 24 [V] |
| Prąd szczytowy zasilania w moc | 10 [A] |
| Prąd szczytowy zasilania w logikę | 1 [A] |
| Typ ochrony wg IEC 60529 | IP20 |
| Masa | 0.54 [kg] |
Konstrukcja w przekroju
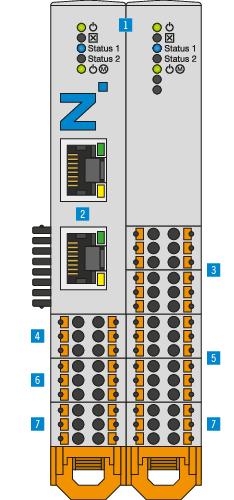
- Status Wskaźnik stanu SCM oraz urządzeń IO-Link
- Ethernet RJ45 Tymczasowe łącze do konfigurowania chwytaków
- Digital Input Wejścia cyfrowe do sterowania ruchami chwytaków
- IO-Link / Urządzenie 1 Złącze modułu chwytającego 1
- Digital Output Wyjścia cyfrowe do monitorowania czujników chwytaków
- IO-Link / Urządzenie 2 Złącze modułu chwytającego 2
- Zasilanie Zasilanie elektryczne SCM oraz chwytaków
Opis / Schemat podłączenia
Opis:
- SCM-C wstępnie okablowany, gotowy do podłączenia (pasujący SCM-C: SCM-C-02-01/02/11/12-A)
- W komplecie gotowy przewód łączący do podłączenia do sterownika robota
- Aplikacja Comfort – konfiguracja chwytaka na laptopie – ADP-80-000007-A
- Interfejs HMI Zimmer Group (program do komputerów Windows)
Schemat podłączenia:
