BAG1000-137855-A
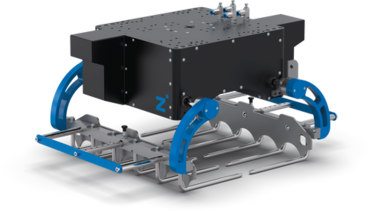
袋子机械抓手
BAG1000 系列
- 同步的气动手指运动和力储存,确保袋子居中,使用寿命长
- 大型驱动气缸,循环时间短,每分钟高达 20 次循环,视机器人和移动距离而定
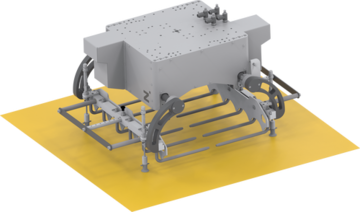
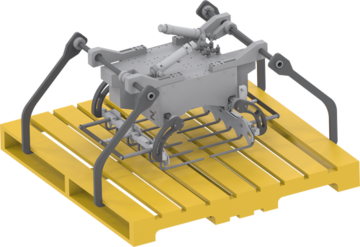
- 可选功能如压紧装置、中间垫层搬运和托盘搬运
- 专用于食品或危险材料/化学材料的叉子
- 可提供用于 Yaskawa/ABB 机器人的码垛和拆垛软件
设备/选项
 IP54
IP54 气动
气动 外夹持
外夹持 夹爪同步运动
夹爪同步运动 夹持力保持装置可保持压力
夹持力保持装置可保持压力
技术数据
| 驱动类型 | 气动 |
| 连接 | 机器人 |
| 机械手的运动类型 | 码垛模式 |
| 夹具类型 | 正向锁定 |
| 扣人心弦的概念 | 下握把 |
| 夹持力保持装置可保持压力 | Ja |
| 夹爪同步运动 | 是 |
| 闭合时间/张开时间 | 0.6 / 0.6 [s] |
| 查询类型 可用部件 | 容式 |
| 工件的排列 | 堆栈 |
| 夹具中的工件数量 | 1 |
| 最大工件重量 | 50 [kg] |
| 系统重量 | 55 [kg] |
| 额定操作气压 | 6 [bar] |
| 认证 | LABS / REACH / RoHS |
| 根据IEC 60529标准安全保护 | IP54 |
资料下载
PDF 数据表
下载

