BAG1000-165171-A
袋子机械抓手
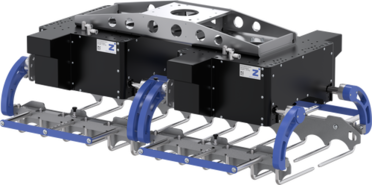
BAG1000 系列
- 同步的气动手指运动和力储存,确保袋子居中,使用寿命长
- 大型驱动气缸,循环时间短,每分钟高达 20 次循环,视机器人和移动距离而定
- 可选功能如压紧装置、中间垫层搬运和托盘搬运
- 专用于食品或危险材料/化学材料的叉子
- 可提供用于 Yaskawa/ABB 机器人的码垛和拆垛软件
设备/选项
 IP54
IP54 气动
气动 外夹持
外夹持 夹爪同步运动
夹爪同步运动 夹持力保持装置可保持压力
夹持力保持装置可保持压力
资料下载
PDF 数据表
下载

