System reference
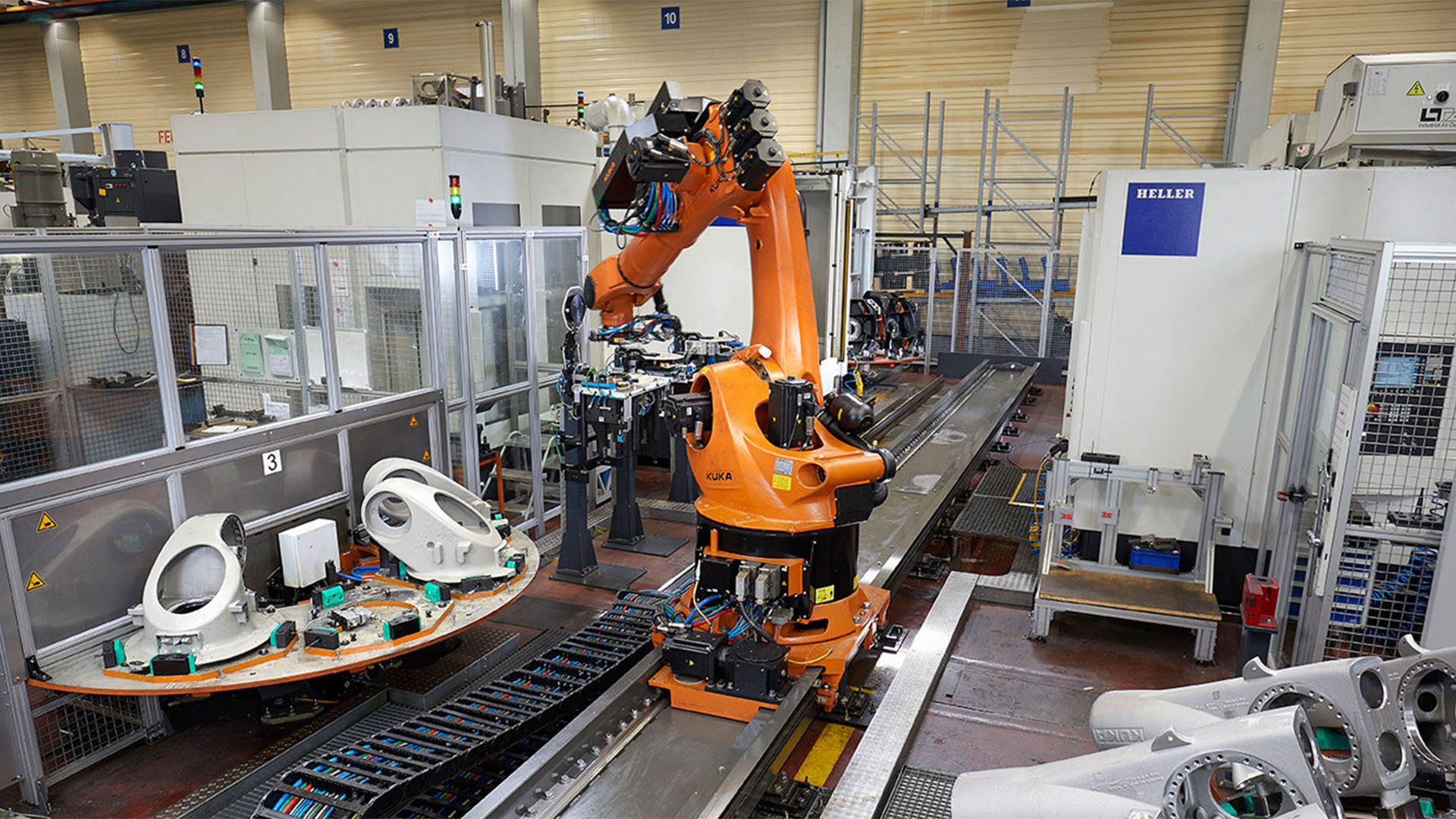
Handling system for robot housing
System solutions | Robotic solutions | Industrial robots
Tool Changers
Series WWR1000

2-Jaw Parallel Grippers
Series GP400
- High gripping force as a result of optimal direction change of driving force into gripping force

2. 2-jaw parallel grippers
- High gripping force as a result of optimal direction change of driving force into gripping force

Challenge
Three machining centers were to be interlinked with a robot. Since the automation was retrofitted, the space requirement and thus the robot size was limited. A very large variety of parts was also to be run on the machines.
Solution
Due to the variety of parts, an automatic gripper change was used. The grippers were designed to be weight-optimized so that a compact robot could be used.
Highlights and technical data
 IP40
IP40 Pneumatic
Pneumatic External gripping
External gripping Internal gripping
Internal gripping Position maintenance by means of clamping element
Position maintenance by means of clamping element
Technical Data
| Drive type | PNEU |
| Max. gripping force | 6600 [N] |
| Gripping concept | FORM |
| Gripping safety device | KLE |
| Max. stroke | 200 [mm] |
| IP class | IP40 |
| System weight | 112 [kg] |
Built-in standard components