2-Jaw Parallel Grippers
Series GEP2000
"The electric compact one"
- Largest stroke in small installation space
Do you require a large stroke, due to the fact that you are operating either a form fit gripper or a large range of parts but the installation space and the load capacity of your application is limited? Then this gripper is perfect for you! - The simplest activation
It is your choice whether you want to control the gripper by means of I/O ports—like a valve—or if you prefer the version with IO-Link. Both have this in common: they are easy to integrate into your control system. - Positionability via IO-Link
Allows you to position the gripper jaws of the IL-03 and IL-43 variant. In this way, the stroke can be flexibly adapted to the workpiece, which saves time in the process and prevents interfering contours.
Series features
 10 million maintenance-free cycles (max.)
10 million maintenance-free cycles (max.) Integrated sensing
Integrated sensing IP40
IP40 IP54
IP54 Self locking mechanism
Self locking mechanism Magnetic field sensor
Magnetic field sensor Positionable
Positionable Gripping force adjustable
Gripping force adjustable IO-Link
IO-Link Digital I/O
Digital I/O Cleanroom-certified
Cleanroom-certified
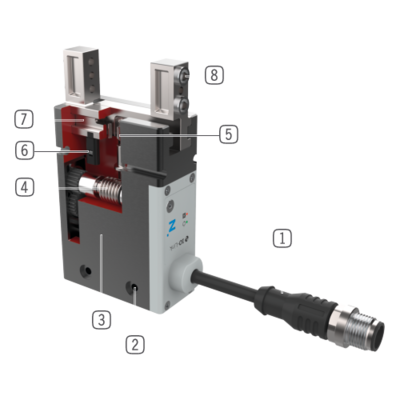
- Control
Via I/O ports (IO) or via IO-Link (IL) - Mounting and positioning
mounting possible from several sides for versatile positioning - BLDC motor
wear-resistant brushless DC motor - Helical worm gear
self locking mechanism in case of power drop - Synchronization
via rack and pinion - Position sensing
Permanent magnet for direct query of jaw movement via magnetic field sensors - Gripper jaw
individual gripper finger mounting - Removable centering sleeves
quick and economical positioning of the gripper fingers

 | Use
Advantage
| Details | ||
 | Use
Advantage
| Details |