BAG1000-137256-A
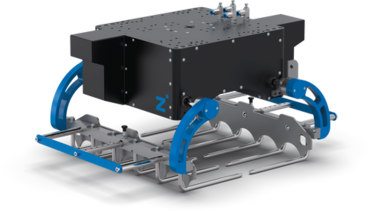
Bag gripper
Series BAG1000
- Synchronous, pneumatically operated jaw movement and force conservation keep the bag centered and ensure a long service life
- Large drive cylinders for fast cycle times of up to 20 cycles per minute, depending on the robot and travel distance
- Optional functions such as hold-down equipment, intermediate layer handling and pallet handling
- Special forks for foodstuffs or for hazardous/chemical materials
- Palletizing and depalletizing software for Yaskawa/ABB robots available
Equipment/Options
 IP54
IP54 Pneumatic
Pneumatic External gripping
External gripping Gripper jaws are synchronized
Gripper jaws are synchronized Gripping force safety device for pressure maintenance
Gripping force safety device for pressure maintenance
Technical Data
| Type of drive | pneumatic |
| Connection | Robots |
| Movement type of the gripper | Palletizing mode |
| Gripper type | Form fit |
| Gripping concept | Undergrip |
| Gripping force safety device for pressure maintenance | Ja |
| Gripper jaws are synchronized | Yes |
| Closing time / Opening time | 0.6 / 0.6 [s] |
| Query type part available | capacitive |
| Arrangement of the workpieces | Stack |
| Number of workpieces in the gripper | 1 |
| Workpiece weight max. | 25 [kg] |
| System weight | 45 [kg] |
| Nominal operating pressure | 6 [bar] |
| Certifications | LABS / REACH / RoHS |
| Protection to IEC 60529 | IP54 |
Downloads
PDF datasheet
Download