AR63P

Compensadores de ejes
Serie ARP
- Posición centrada bloqueable
Al mover el robot, puede fijar la compensación de modo que la pieza no se mueva de forma incontrolada - De construcción extremadamente plana
Este tipo de construcción reduce al mínimo la carga de momentos para los robots y permite emplear tamaños menores y más económicos - Momentos y fuerzas de compensación variables
Adapte la compensación al peso de manipulación mediante el montaje del conjunto de muelles adecuado según la rigidez deseada
Datos técnicos
| Brida de conexión según EN ISO 9409-1 | TK 63 |
| Altura constructiva | 24 [mm] |
| Desviación horizontal +/- | 2 [mm] |
| Desviación horizontal +/- | 1 [°] |
| Desviación vertical +/- | 2 [mm] |
| Desviación vertical +/- | 1 [°] |
| Fuerza de centraje en posición enclavada | 600 [N] |
| Precisión de repetición horizontal +/- | 0.05 [mm/°] |
| Precisión de repetición vertical +/- | 0.05 [mm/°] |
| Volumen de aire por ciclo | 3.6 [cm³] |
| Presión de servicio | 1 ... 8 [bar] |
| Presión de servicio nominal | 6 [bar] |
| Temperatura de servicio | 5 ... +80 [°C] |
| Momento de inercia | 2.8 [kgcm²] |
| Peso | 0.39 [kg] |


Detalle de las ventajas
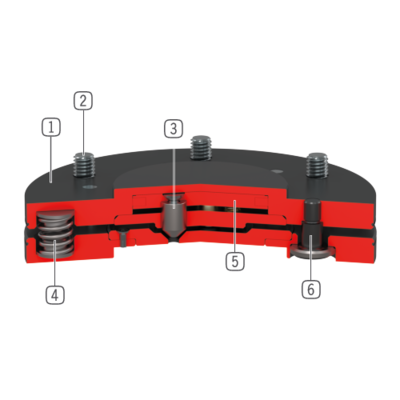
- Carcasa robusta y ligera
Aleación de aluminio anodizado duro - Brida de sujeción a robot
circulo primitivo según EN ISO 9409-1 - Enclavamiento
3 Émbolos de enclavamiento acero nitrurado - Conjunto de muelles
a partir del tamaño 63, se suministra un segundo juego de muelles más fuertes a partir del tamaño 100, se pueden retirar 3 muelles - Accionamiento de enclavamiento
cilindro neumático de simple efecto - Leva de guía con alojamiento de bola