HRC-03-126649
- Diseñadas según las recomendaciones BG/DGUV
- Con la certificación BG/DGUV
- Flexibilidad mediante detección de la pieza de trabajo integrada durante toda la carrera
- Tecnología de transmisiones sin escobillas
- Autorretención mecánica para una manipulación segura también en el modo de parada de emergencia
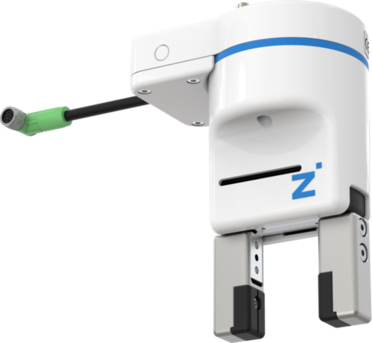
Datos técnicos
| Carrera por mordaza | 10 [mm] |
| Fuerza de agarre nominal | 190 [N] |
| Accionamiento | I/O |
| Apropiado para tipo robot | SIASUN SCR5/YASKAWA HC10 P-Version |
| Gestión de cables | interna |
| Diseño MRK según ISO/TS 15066 | Sí |
| Forma HRC | colaborativa |
| Tipo de unidad | eléctricas |
| Detección de la posición | integrada |
| Solicitud de posición del campo magnético | Sí |
| Salida de conmutación | PNP |
| Fuerza de agarre al cerrar (ajustable) max. | 190 [N] |
| Autorretención | mecánica |
| Fuerza de agarre al abrir (ajustable) max. | 190 [N] |
| Tiempo de cierre | 0.19 [s] |
| Fuerza de agarre según ISO/TS 15066 | <140 [N] |
| Tiempo de apertura | 0.19 [s] |
| Sincronización | 0,03 [s] |
| Peso propio del dedo montado máx. | 0.1 [kg] |
| Longitud de los dedos máx. | 80 [mm] |
| Precisión de repetición +/- | 0.05 [mm] |
| Temperatura de servicio | 5 ... +50 [°C] |
| Tensión | 24 [V] |
| Consumo de corriente max. | 1 [A] |
| Trayecto de arranque mínimo por mordaza | 0.5 [mm] |
| Homologaciones | CE / UKCA / LABS / REACH / RoHS |
| Protección según IEC 60529 | IP40 |
| Peso | 0.68 [kg] |