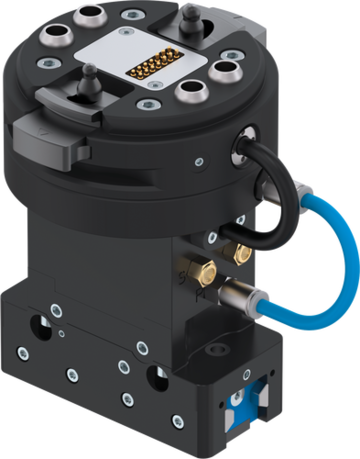
LWR50F-14-04-A

MATCH - Modulo robot
Serie LWR
- Un sistema per cobot e robot convenzionali
- Interfaccia robot standardizzata per la manipolazione (presa meccanica e vuoto)
- Cambio manuale con funzione Easy-Click (comando a una mano)
- Cambio automatico senza controllo esterno nella stazione di deposito
- Compatibilità e flessibilità: le tecnologie principali per la movimentazione (pinze a vuoto e meccaniche) in un tutt’uno
- Indicatore ottico a LED Connect
- Comando delle pinze mediante IO-Link
- Connettore specifico per il robot per il collegamento diretto all'utensile IO del robot
Dati tecnici
| Adatto per tipo di robot | ABB CRB 1100 SWIFTI |
| Comando | IO-Link |
| Flangia di collegamento secondo EN ISO 9409-1 | TK 31,5 |
| Peso maneggiabile max. | 25 [kg] |
| Cavo di collegamento | Spina, M12, a 12 poli |
| Corsa di serraggio | 1 [mm] |
| Alimentazione elettrica | integrato |
| Alimentazione pneumatica | integrato |
| Forza di serraggio | 50 [N] |
| Ripetibilità nell'asse X e Y | 0,05 [mm] |
| Ripetibilità nell'asse Z | 0,05 [mm] |
| Disassamento massimo durante l'accoppiamento in X,Y | 1 [mm] |
| Temperatura di esercizio | 5 ... +60 [°C] |
| Vita di servizio in cicli | 100000 |
| Certificazioni | CE / UKCA / LABS / REACH / RoHS |
| Grado di protezione secondo IEC 60529 | IP40 |
| Peso | 0.4 [kg] |