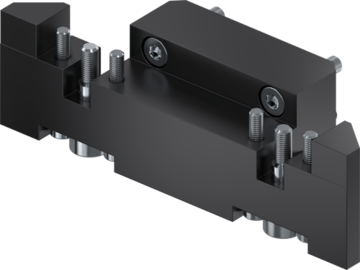
WWR63F-B

Cambioutensile
Serie WWR
- Tenuta sicura in caso di caduta di pressione
La combinazione di un meccanismo a molla e di una elevata coppia garantiscono una macchina sicura. - Struttura estremamente piatta
Questa struttura riduce al minimo il carico dei momenti per il vostro robot e consente di scegliere dimensioni più piccole e meno costose - Varietà inesauribile di trasmissione mezzi
Non importa quale mezzo volete trasmette, noi l'abbiamo già fatto una volta e troveremo anche per voi la soluzione più adeguata!
Dati tecnici
| Flangia di collegamento secondo EN ISO 9409-1 | TK 63 |
| Tipo di Azionamento | pneumatico |
| Alimentazione pneumatica | 6 [Numero di passaggi] |
| Alimentazione elettrica | opzionale |
| Portata d'aria per ogni passaggio | 170 [l/min] |
| Mantenimento della forza di presa durante il serraggio | meccanico |
| Corsa di serraggio | 1 [mm] |
| Ripetibilità nell'asse Z | 0.01 [mm] |
| Ripetibilità nell'asse X e Y | 0,02 [mm] |
| Forza di accoppiamento | 110 [N] |
| Forza di distacco | 60 [N] |
| Disassamento massimo durante l'accoppiamento in X,Y | 1.65 [mm] |
| Pressione di esercizio | 4 ... 10 [bar] |
| Pressione di esercizio nominale | 6 [bar] |
| Temperatura di esercizio | 5 ... +80 [°C] |
| Volume del cilindro per ciclo | 9 [cm³] |
| Momento d'inerzia | 2.3 [kgcm²] |
| Certificazioni | LABS / REACH / RoHS |
| Peso | 0.37 [kg] |







Individualizzazioni
 | Utilizzo
Vantaggio
| Dettagli | ||
 | Utilizzo
Vantaggio
| Dettagli |
Benefici nel dettaglio
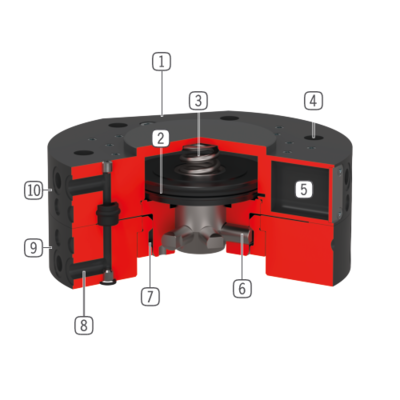
- Fissaggio elementi di connessione
- Azionamento
cilindro pneumatico a doppio effetto - Molla integrata
accumulatore di energia in caso di caduta di pressione - Flangia robot
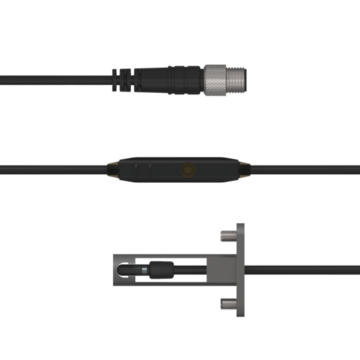
Diametro primitivo realizzato secondo EN ISO 9409-1 - Rilevamento della posizione del pistone
mediante sensore magnetico - Meccanismo di serraggio
permette di mantenere agganciata la parte fissa a quella mobile - Bussola di serraggio
assorbimento elevato dei momenti - Passaggio aria integrato
Passaggio aria / vuoto Possibile azionamento senza tubi flessibili - Parte mobile
Per il montaggio lato utensile - Parte fissa
Per il montaggio lato robot


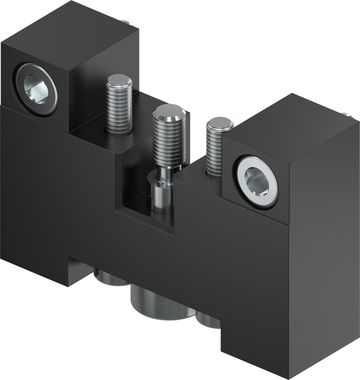


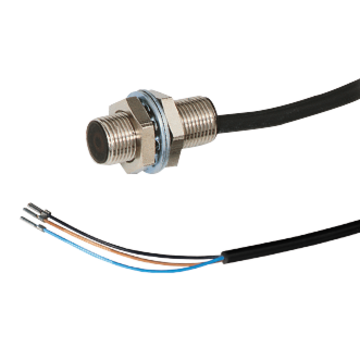
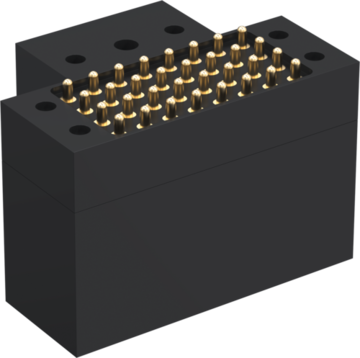
Elementi di connessione
Tipo di trasmissione Comunicazione


Tipo di trasmissione elettrica
| Filettatura di collegamento | Quantità di passaggi pneumatici | Numero contatti | ||||
|---|---|---|---|---|---|---|
 Modello precedente | Modello precedente | M8 | 4 | Dettagli | ||
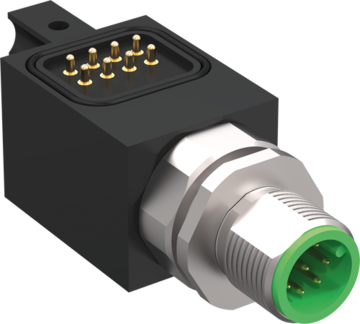 Modello precedente | Modello precedente | M12 | 8 | Dettagli | ||
 Modello precedente | Modello precedente | M8 | 8 | Dettagli | ||
 Modello precedente | Modello precedente | M12 | 12 | Dettagli | ||
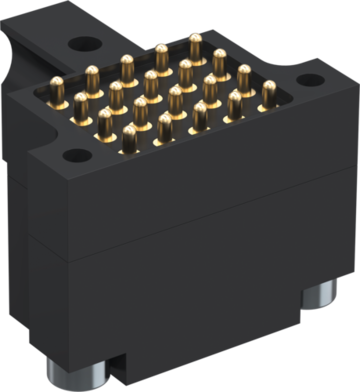 Modello precedente | Modello precedente | 20 | Dettagli | |||
 Modello precedente | Modello precedente | 32 | Dettagli | |||
 Modello precedente | Modello precedente | M8 | 4 | Dettagli | ||
 Modello precedente | Modello precedente | M8 | 8 | Dettagli |
Tipo di trasmissione pneumatici
| Filettatura di collegamento | Quantità di passaggi pneumatici | Numero contatti | ||||
|---|---|---|---|---|---|---|
 Modello precedente | Modello precedente | M5 | 2 | Dettagli | ||
 Modello precedente | Modello precedente | M5 | 4 | Dettagli | ||
 Modello precedente | Modello precedente | G1/4" | 1 | Dettagli | ||
 Modello precedente | Modello precedente | G1/8" | 2 | Dettagli | ||
 Modello precedente | Modello precedente | M5 | 6 | Dettagli |