Smart Communication Module
Serie SCM

- Conversión de IO-Link a entradas y salidas digitales (E/S digitales) y de E/S digitales a IO-Link
- Control muy sencillo de las pinzas IO-Link mediante E/S digital 24 V
- La configuración y el aprendizaje se lleva a cabo con el software intuitivo guideZ
- Juego de cables listos para conectar para el tipo de controlador correspondiente
- Se puede utilizar con una o dos pinzas, en función de la flexibilidad que se necesite
- En función de la flexibilidad requerida, pueden utilizarse hasta 15 piezas diferentes para una pinza. Como alternativa, se pueden utilizar dos pinzas.
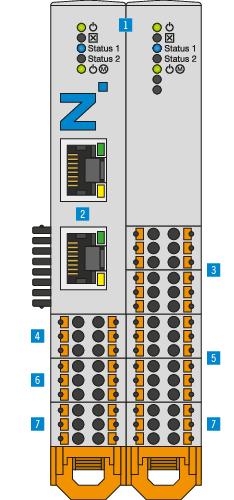
- Estado Indicación de estado del SCM y del componente IO-Link
- Ethernet RJ45 Conexión temporal para la configuración de la pinza
- Digital Input Entradas digitales para el control del actuador de la pinza
- IO-Link / Device 1 Conexión módulo de pinza 1
- Digital Output Salidas digitales para la monitorización de los sensores de la pinza
- IO-Link / Device 2 Conexión módulo de pinza 2
- Alimentación Alimentación de tensión de SCM y de pinza
Esquema de conexiones:
IO-Link
- SCM-C precableado, listo para conectar (SCM-C: SCM-C-01-00-A)
- SCM-F LWR50F-01-03-A (Este SCM-F solo es compatible con ADP-80-00020-A)
- Incluido cable de conexión listo para enchufar en el controlador del robot
- Comfort App – Configuración de la pinza en el portátil – ADP-80-000021-A
- Comfort App – Configuración de la pinza en el robot – ADP-80-000020-A
- Comfort App – Configuración de la pinza en el robot – ADP-80-000003-A (se necesita un maestro externo)
- Human Machine Interface de Zimmer Group (programa para PC Windows)
I/O
- Comfort App – Configuración de la pinza en el robot – ADP-80-000022-A
Descripción:
