LWR50L-02-00002-A

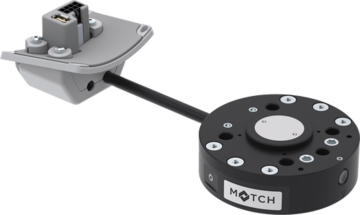
큰 스트로크를 갖는 2조 평행 그리퍼
시리즈 LWR
- DGUV 인증 협업 그리퍼
- 내장 컨트롤러 장착 서보 드라이브
- 민감한 실행
- IO-Link 제어
- LWR 고정 부품과 함께 사용 (IO-Link / RS485)
- 서보 기술 덕분에 더 큰 공작물 및 다양한 치수의 적용에 최적
기술 데이터
| 조당 스트로크 | 60 [mm] |
| 조당 스트로크, 조절 가능 | 60 [mm] |
| 정격 파지력 | 180 [N] |
| 제어 | IO-Link |
| 시리즈에 적합 | LWR50F-xx-03/04/05 |
| ISO/TS 15066에 따른 MRK 설계 | 예 |
| 작동 온도 | 5 ... +50 [°C] |
| 인증 | CE / UKCA / LABS / REACH / RoHS |
| IEC 60529 준거 보호방식 | IP40 |
| 무게 | 1.6 [kg] |
| 전기 에너지 전달 | 통합 |
| 잠금 스트로크 | 1 [mm] |
| X, Y 반복정밀도 | 0,05 [mm] |
| Z 반복정밀도 | 0,05 [mm] |
| 조임력 | 50 [N] |
| 최대로 X, Y에서 커플링시 축오프셋 | 1 [mm] |
| HRC 형태 | 협업 |
| 케이블 가이드 | 내장 |
| 동력종류 | 전동식 |
| 통합된 위치 검출 | 예 |
| 최소 파지력 | 20 [N] |
| ISO/TS 15066에 따른 파지력 | <140 [N] |
| 제어 시간 | 0.125 [s] |
| 조립된 그리퍼 조 자체 최대 중량 | 0,3 [kg] |
| 그리퍼 조 최대 길이 | 80 [mm] |
| 최대 턱당 파지 속도. | 30 [mm/s] |
| 턱당 최대 위치 지정 속도. | 60 [mm/s] |
| 반복정밀도 +/- | 0.05 [mm] |
| 전압 | 24 [V] |
| 최대 소비 전력 | 0.8 [A] |
| 그리퍼 조 하나당 최소 접근 거리 | 2 [mm] |