SCM-C-02-02-A

Smart Communication Module
Série SCM
- Conversion IO-Link vers entrées et sorties numériques (Digital I/O), et Digital I/O vers IO-Link
- Commande ultra simple des pinces IO-Link intelligentes via Digital I/O 24 V
- La configuration et l’apprentissage sont assurés par le logiciel intuitif associé guideZ
- Jeu de câbles prêt à être raccordé pour le type de contrôleur correspondant
- Peut être utilisé avec une ou deux pinces selon la flexibilité requise
- En fonction de la flexibilité nécessaire, jusqu'à 15 pièces différentes peuvent être utilisées pour un préhenseur. En alternative, deux pinces peuvent être utilisées.
Données techniques
| Pour type de robot | Yaskawa GP / HC-Series |
| Pour type de contrôleur | Yaskawa - YRC 1000 NPN |
| Logique IO | NPN |
| Commande | Digital I/O |
| Nombre de pinces max. | 2 |
| Nombre de broches (Commande Entrée) | 12 |
| Nombre de broches (Commande Sortie) | 12 |
| Interface de configuration | Ethernet RJ45 |
| Tension | 24 [V] |
| Courant de pointe de l’alimentation de charge | 10 [A] |
| Courant de pointe de l’alimentation logique | 1 [A] |
| Homologations | CE / UKCA / LABS / REACH / RoHS |
| Protection de IEC 60529 | IP20 |
| Poids | 0.86 [kg] |
Avantages en détail
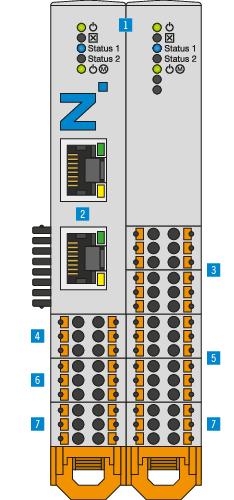
- État Affichage d’état du SCM et de l’appareil IO-Link
- Ethernet RJ45 Connexion temporaire à la configuration de la pince
- Digital Input Entrées numériques pour commander les actionneurs de la pince
- IO-Link / Appareil 1 Raccordement du module de préhension 1
- Digital Output Sorties numériques pour surveiller les capteurs de la pince
- IO-Link / Appareil 2 Raccordement du module de préhension 2
- Alimentation Alimentation électrique du SCM et de la pince
Description / Schéma de connexion
Description :
- SCM-C précâblé, prêt à la connexion (SCM-C correspondant : SCM-C-02-01/02/11/12-A)
- Y compris câble de connexion enfichable sur le contrôleur de robot
- Comfort App – Configuration de la pince sur l’ordinateur portable – ADP-80-000007-A
- HMI Zimmer Group (programme pour PC Windows)
Schéma de connexion :
