BAG1000-165171-A
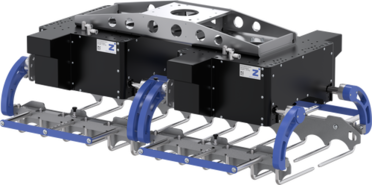
Pince de sacs
Série BAG1000
- Le mouvement synchrone des mors à commande pneumatique et l’accumulation de force maintiennent le sac centré et assurent une longue durée de vie
- Grands cylindres d’entraînement pour des temps de cycle rapides allant jusqu’à 20 cycles par minute, en fonction du robot et du trajet
- Fonctions en option telles que le dispositif de support, la manutention en couches intermédiaires et la manutention de palettes
- Fourches spéciales pour les applications alimentaires ou les matériaux dangereux/chimiques
- Logiciel de palettisation et dépalettisation disponible pour les robots Yaskawa/ABB
Équipement/Options
 IP54
IP54 Pneumatiques
Pneumatiques Préhension externe
Préhension externe Mors de préhension synchronisés
Mors de préhension synchronisés Sécurité de la force de préhension avec maintien de la pression
Sécurité de la force de préhension avec maintien de la pression
Téléchargements
Fiche technique au format PDF
Télécharger