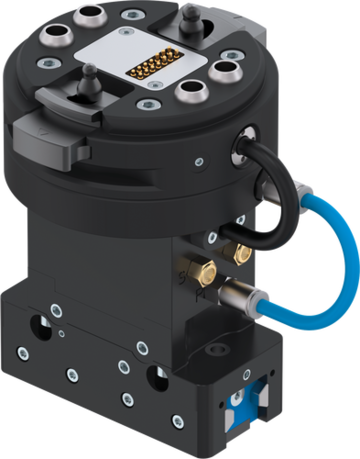
LWR50F-22-04-A

MATCH - Module robot
Série LWR
- Un système pour les cobots et robots conventionnels
- Interface robot standardisée pour la manutention (préhension mécanique et vide)
- Changement manuel grâce à la fonction Easy-Click (utilisation à une main)
- Changement automatisé sans commande externe dans la station de dépôt
- Grande variété d’effecteurs terminaux
- Indicateur Connect-LED optique
- Commande de pinces via IO-Link
- Prise spécifique au robot pour la connexion directe à l’outil robotique IO
Données techniques
| Pour type de robot | ABB CRB 1100 SWIFTI |
| Commande | IO-Link |
| Bride de raccordement pour EN ISO 9409-1 | TK 40 |
| Poids de manutention max. | 25 [kg] |
| Câble de raccordement | Prise, M12, 12 pôles |
| Course de verrouillage | 1 [mm] |
| Transfert électrique de l’énergie | intégrée |
| Transfert pneumatique de l’énergie | intégrée |
| Force de serrage | 50 [N] |
| Précision de répétition en X, Y | 0,05 [mm] |
| Précision de répétition en Z | 0,05 [mm] |
| Déport max. de l’axe au couplage en X, Y | 1 [mm] |
| Température de service | 5 ... +60 [°C] |
| Durée de vie en cycles | 100000 |
| Homologations | CE / UKCA / LABS / REACH / RoHS |
| Protection de IEC 60529 | IP40 |
| Poids | 0.41 [kg] |