WWR125F-B
Modèle précédent

Remarque sur le modèle précédent
Ce produit fait partie d'une génération précédente de produits, mais il est toujours disponible. Pour les nouvelles constructions, nous recommandons d'utiliser le modèle successeur plus développé de la série WPR5000. Vous pouvez y accéder en cliquant sur le lien ci-dessus. Bien entendu, les informations techniques et le support concernant ce produit restent à votre disposition. Si vous avez des questions, veuillez utiliser notre formulaire de contact - nous nous ferons un plaisir de vous aider !
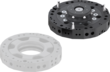
Changeurs d‘outils
Série WWR
Données techniques
| Bride de raccordement pour EN ISO 9409-1 | TK 125 |
| Type d’entraînement | pneumatique |
| Transfert pneumatique de l’énergie | 10 [Nombre] |
| Transfert électrique de l’énergie | en option |
| Transfert hydraulique de l’énergie | en option |
| Débit par transmetteur | 500 [l/min] |
| Auto-maintien lors du verrouillage | mécanique |
| Course de verrouillage | 1.3 [mm] |
| Précision de répétition en Z | 0.01 [mm] |
| Précision de répétition en X, Y | 0,02 [mm] |
| Force de serrage | 150 [N] |
| Force de desserrage | 80 [N] |
| Déport max. de l’axe au couplage en X, Y | 2.85 [mm] |
| Pression de service | 4 ... 10 [bar] |
| Pression de service nominal | 6 [bar] |
| Température de service | 5 ... +80 [°C] |
| Volume du vérin par cycle | 80 [cm³] |
| Moment d’inertie | 48 [kgcm²] |
| Homologations | LABS / REACH / RoHS |
| Poids | 2.2 [kg] |
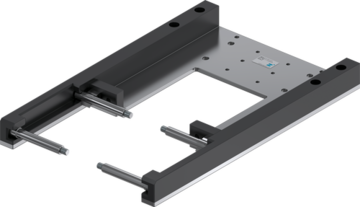
Partie mobile adaptée
 | Modèle précédent | Détails |




Individualisations
 | Utilisation
Avantage
| Détails | ||
 | Utilisation
Avantage
| Détails |
Avantages en détail
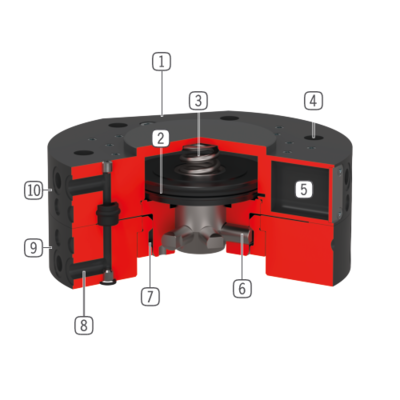
- Fixation élément énergétique
- Entraînement
vérin pneumatique à double effet - Ressort intégré
auto maintien en cas de coupure d´énergie - Bride de connexion au robot
diamètre et usinage aux normes EN ISO 9409-1 - Détection du piston
par capteur magnétique - Bille de vérouillage
adapte á la douille de vérouillage - Anneau de verrouillage
pour une grande absorbtion des couples - Passages d'air intgrés
Conduite / vide d'air Sans tuyaux - Partie mobile
Pour le montage de l´outil - Partie fixe
Partie fixe au robot


Éléments énergétiques
Mode de transfert Communication





Mode de transfert fluide
| Raccord fileté | Nombre de raccords pour fluides | Nombre de contacts | ||||
|---|---|---|---|---|---|---|
 | G1/4" | 1 | Détails |
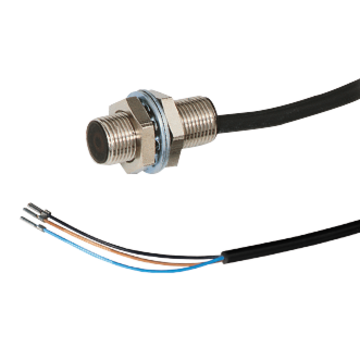
Mode de transfert pneumatique



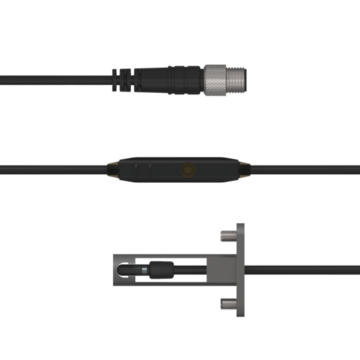
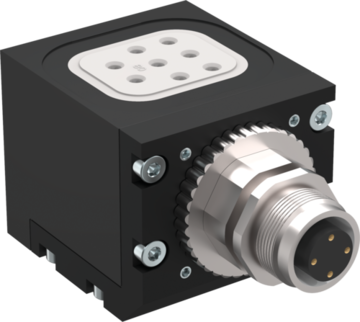
Mode de transfert électrique
| Raccord fileté | Nombre de raccords pour fluides | Nombre de contacts | ||||
|---|---|---|---|---|---|---|
 | M8 | 1 | Détails | |||
 | M23 | 5+PE | Détails | |||
 | M23 | (3+PE) / 4 | Détails | |||
 | M23 | 11+1 | Détails | |||
 | M23 | 11+1 | Détails | |||
| M23 | 12 | Détails | |||
| M23 | 12 | Détails | |||
 | M23 | 14 + 5 capteurs | Détails | |||
 | M23 | 14 + 5 capteurs | Détails | |||
 | M23 | 14 + 5 capteurs | Détails | |||
 | M23 | 14 + 5 capteurs | Détails | |||
 | M23 | 18+1 | Détails | |||
 | M23 | 18+1 | Détails | |||
| M23 | 19 | Détails | |||
| M23 | 19 | Détails | |||
 | M12 | 8+2 | Détails | |||
 | 1 | Détails |